









[01811] 서울 노원구 공릉로 232 서울과학기술대학교
기계설계자동화 ○TEL: 02-970-6351, 6385 ○FAX: 02-974-8270
기계정보공학 ○TEL: 02-970-6306 ○FAX: 02-976-5173
| 제목 | [기계설계로봇] 강민규 석사과정, Advanced Functional Materials (IF: 19) 표지논문 게재 (지도교수: 표순재) | 날짜 | 2025-12-09 | 조회수 | 1102 |
|---|---|---|---|---|---|
| 작성자 | 기계설계로봇공학과 | ||||
| 첨부파일 | |||||
|
[기계설계로봇]강민규 석사과정, Advanced Functional Materials (IF: 19) 표지논문 게재 (지도교수: 표순재)
- 누를수록 안으로 응축되는 ‘오세틱(Auxetic)’ 구조.. 힘 분산 막아 ‘감도 향상’ 실현 - 옆으로 퍼지지 않아 ‘꽉 낀 공간’에서도 성능 저하 無... 두 마리 토끼 잡아 - 재료과학 분야 최상위 권위지 ‘Advanced Functional Materials’ 11월 25일 자 표지논문 선정
마이크로나노소자 연구실(https://sites.google.com/view/soonjaepyo/, 지도교수 표순재)의 강민규 석사과정 연구원이 ‘누르면 쪼그라드는’ 독특한 성질을 가진 3D 오세틱 메타물질(Auxetic material)을 기반으로 어떠한 환경에서도 고감도로 반응하는 고성능 촉각 센서를 개발하였다.
이번 연구 성과는 표순재 교수 연구팀과 박근 교수 연구팀의 공동연구로 이뤄졌으며, 재료과학 분야의 세계적 권위지인 ‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’ 2025년 35권 47호(11월 25일 발간)의 표지논문(Front Cover)으로 선정되며 국제적인 주목을 받았다.
논문명: Additively Manufactured 3D Auxetic materials for Structurally Guided Capacitive and Resistive Tactile Sensing (doi.org/10.1002/adfm.202509704)
▲ 논문 표지
■ 누르면 안으로 모인다... ‘힘의 집중’으로 초고감도 달성
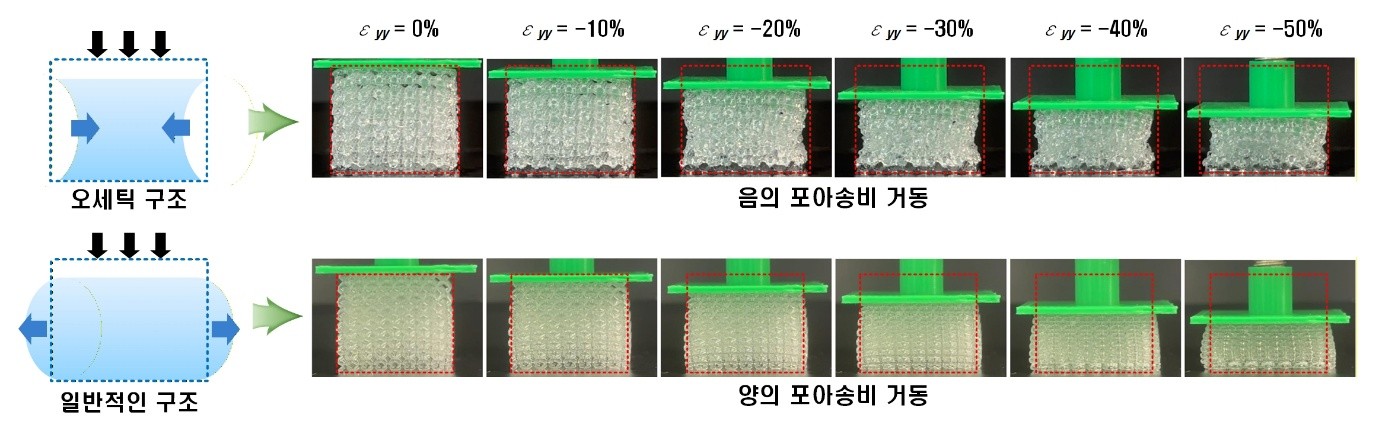
기존의 고무나 스펀지 소재 센서는 위에서 누르면 옆으로 퍼지는 성질 (양의 포아송 비)때문에 가해지는 힘이 분산되어 외부 자극을 감지하는 데 한계가 있었다.
표순재 교수팀은 이를 해결하기 위해 ‘오세틱(Auxetic)’ 구조를 도입했다. 연구팀이 개발한 3D 구조체는 누를수록 구조가 중심부로 수축하며 응축되는 성질(음의 포아송 비)을 가진다. 이 독특한 구조는 외부에서 가해지는 압력을 옆으로 흘려보내지 않고 센서 중심부로 집중시킨다. 덕분에 아주 미세한 힘이나 압력 변화도 놓치지 않고 포착할 수 있어, 동일한 소재를 사용한 일반 센서보다 월등히 높은 민감도를 구현해냈다.
▲ 오세틱 구조와 일반 구조의 압축 변형 거동 비교
■ 3D 프린팅 기술로 ‘안으로 모이는’ 미세 구조 완벽 구현
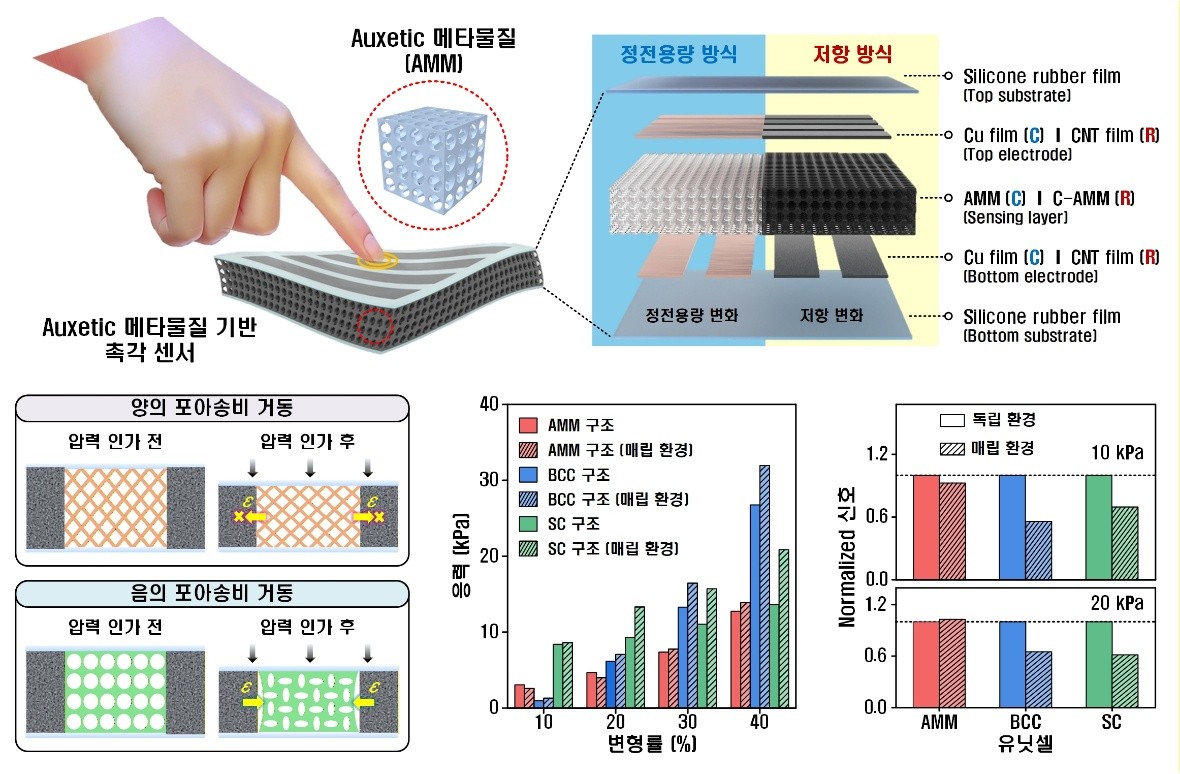
이러한 복잡한 3D 오세틱 구조를 실제 센서로 구현하는 데에는 박근 교수팀의 고정밀 3D 프린팅 기술이 결정적인 역할을 했다. 박근 교수팀은 ‘DLP(Digital Light Processing) 3D 프린팅’ 공정을 이용해, 미세한 구멍이 뚫린 정육면체 격자 구조를 정교하고 결함 없이 출력해냈다. 이 구조체에 전기가 통하는 탄소나노튜브(Carbon nanotube)를 얇게 코팅하거나, 전극 사이에 배치하는 방식만으로 ▲누를 때 전극 간격이 좁아지는 것을 감지하는 ‘정전용량 방식’ ▲전기 저항이 줄어드는 것을 감지하는 ‘저항 방식’ 두 가지 타입의 센서를 모두 구현했다.
■ 옆으로 퍼지지 않으니 ‘꽉 낀 공간’에서도 성능 유지
연구팀은 이 ‘안으로 모이는’ 특성이 센서의 민감도뿐만 아니라 실제 사용 환경에서의 성능 저하 문제까지 완벽하게 해결한다는 점을 밝혀냈다.
로봇의 손가락 내부나 신발 깔창 속처럼 꽉 막힌 공간(매립 환경)에 센서를 넣을 경우, 일반 센서는 옆으로 퍼지려다 주변 벽에 막혀 제대로 눌리지 않거나 오작동을 일으킨다. 하지만 연구팀이 개발한 오세틱 센서는 압력을 받아도 바깥으로 팽창하지 않고 안으로 수축하기 때문에, 주변 공간의 방해를 전혀 받지 않는다.
연구팀은 실험을 통해 비좁은 공간에 매립된 상태에서도 센서가 개방된 환경과 동일한 수준의 고성능을 유지함을 증명했다. 이는 실험실 밖 실제 산업 현장에서 즉각적으로 활용 가능한 기술임을 시사한다.
▲ 오세틱 메타물질 기반 촉각 센서의 구조와 매립 환경 성능 비교
■ 로봇 피부부터 헬스케어까지... 실용성 입증
연구팀은 개발한 센서의 성능을 검증하기 위해 센서를 내장한 ‘스마트 깔창’을 제작했다. 깔창 내부의 제한된 공간 속에서도 센서는 보행 시 발바닥의 압력 분포를 정밀하게 감지해 실시간으로 분석해냈다. 또한, 4x4 배열의 센서 패드를 통해 사과나 테니스공 같은 물체의 미세한 무게와 접촉 면적 차이까지 정확히 구별하며 로봇 피부로서의 활용 가능성도 입증했다.
한편, 본 연구의 제1저자인 강민규 석사과정 연구원은 2024년 3월 기계설계로봇공학과 대학원에 입학한 이후 현재까지 총 11편의 국제저널 논문을 발표하였으며, 이 중 4편은 제1저자로서 수행한 연구 성과이다. 뛰어난 연구 역량을 바탕으로 졸업 후 박사과정에 진학하여 관련 연구를 지속할 예정으로, 본 학과 대학원에서의 체계적 연구환경과 우수한 지도체계를 잘 보여주는 사례이다. |
|||||
 |
[기정]2025학년도 기계정보공학프로그램 졸업작품전시회 개최 결과(25.12.5.금) |
|---|---|
 |
[기계설계로봇] 신승호 석사과정, 한국생산제조학회(나노마이크로시스템 부문) 논문 우수발표상 (지도교수:석재영) |


