









[01811] 서울 노원구 공릉로 232 서울과학기술대학교
기계설계자동화 ○TEL: 02-970-6351, 6385 ○FAX: 02-974-8270
기계정보공학 ○TEL: 02-970-6306 ○FAX: 02-976-5173
| 제목 | [기계설계로봇] 마이크로나노소자연구실, 기계적 메타물질 기반 촉각 센서 리뷰 논문 게재 (지도교수: 표순재) | 날짜 | 2025-11-03 | 조회수 | 862 |
|---|---|---|---|---|---|
| 작성자 | 기계시스템디자인공학과 | ||||
| 첨부파일 | |||||
|
[기계설계로봇] 마이크로나노소자연구실, 기계적 메타물질 기반 촉각 센서 리뷰 논문 게재 (지도교수: 표순재)
마이크로나노소자 연구실(https://sites.google.com/view/soonjaepyo/, 지도교수 표순재)의 강민규 석사과정 연구원이 기계적 메타물질을 활용한 촉각 센서의 작동 메커니즘을 처음으로 제시하고 향후 차세대 촉각 센서 개발을 위한 연구방향을 체계적으로 정리한 리뷰 논문을 발표하였다. 이 연구결과는 2025년 10월 25일자 Advances in Physics: X (IF: 10.8, JCR 상위 6.6%)에 게재되었다. (https://doi.org/10.1080/23746149.2025.2572830)
▲ 강민규 석사과정생
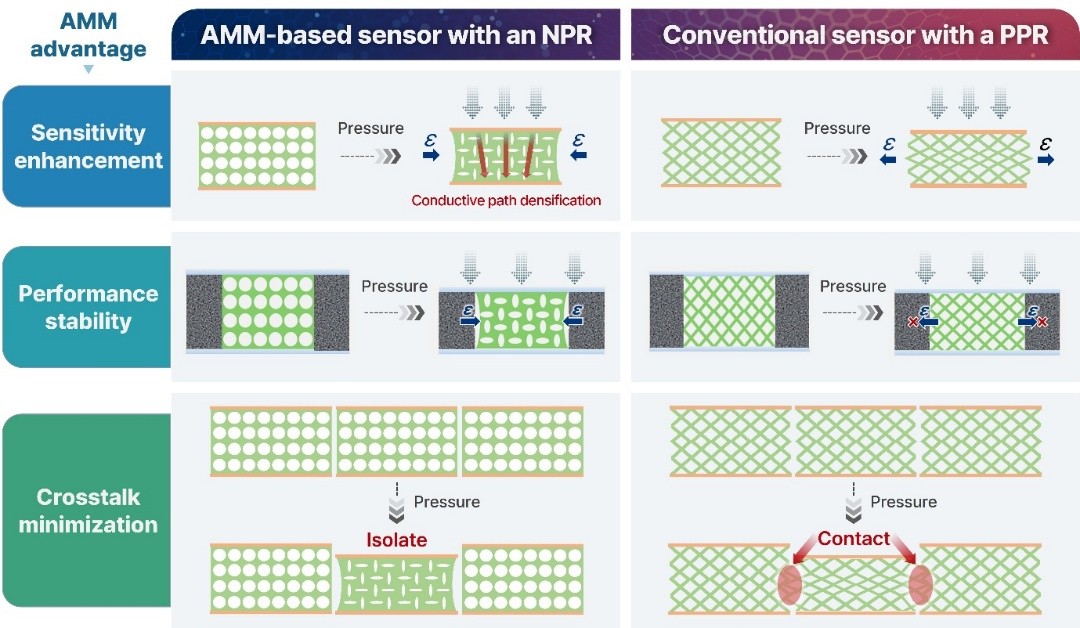
해당 논문의 제목은 “Auxetic Mechanical materials for Resistive Tactile Senors: A Review”로, 음의 포아송 비(Negative Poisson’s Ratio)를 갖는 Auxetic 구조의 기계적 메타물질(Auxetic Mechanical materials, AMMs)이 기존 촉각 센서의 한계를 극복할 수 있는 유망한 플랫폼임을 규명하였다. 본 논문은 Auxetic 구조의 기하학적 특성을 중심으로, 기계적 메타물질의 변형 메커니즘과 저항형 촉각 센서의 전기적 변환 원리, 대표적인 2차원 및 3차원 Auxetic 구조의 설계, 주요 제작 방법, 센서의 구조적 설계에 따른 감도 향상 메커니즘을 포괄적으로 정리하였다. 특히, Auxetic 구조의 내향 수축(inward contraction) 거동이 압축 하중 시 전도 네트워크를 효과적으로 밀집시켜 감도를 높이고, 제한된 공간에서도 안정적인 신호 특성을 유지하며, 센서 어레이 간 물리적 간섭(crosstalk)을 최소화한다는 점을 처음으로 통합적으로 제시하였다. 이번 논문은 소재의 본질적 특성에 의존하지 않고, 기하학적 설계를 통해 물리적 거동과 전기적 응답을 정밀 제어하는 메커니즘 중심의 접근법을 확립하였다. 본 논문을 토대로 향후 로보틱스, 인공 촉각 시스템, 웨어러블 전자소자, 스마트 섬유, 의료용 촉각 인터페이스 등 다양한 응용 분야로의 확장이 기대된다.
▲ 본 논문에서 제시된 Auxetic 메타물질 기반 저항형 촉각 센서의 성능 향상 메커니즘
|
|||||
 |
[기자] MDS “2025 대학생 스마트 e-모빌리티 경진대회 대상(산업부장관상), 연비경진대회 대상 수상” (지도교수 : 김성걸) |
|---|---|
 |
[기정] 제18회 소성가공 스마트설계 경진대회 장관상, 은상 등 총 3명 입상 |


